
18+ 

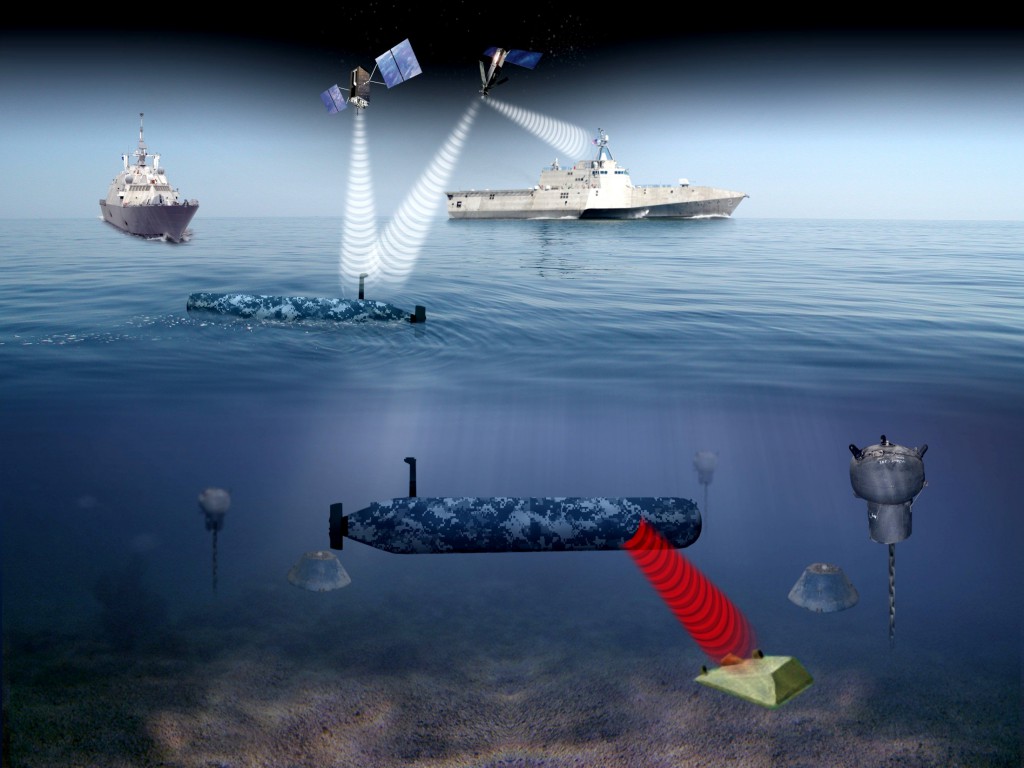
Combat Robots: On the Surface and Underwater
23.06.2016
There is the widespread belief that unmanned aerial vehicles, also known as drones, are used as an alternative air reconnaissance and for strikes against distant targets. The United States used them in Afghanistan, Pakistan, Iraq, Somalia and other countries. But the US Navy, and other kinds of troops connected with water in one or another way (such as the Marine Corps and Special Forces), are also actively using drones for their own needs.
In 2000, the US Naval Surface Warfare Center in Carderock opened a bureau for Unmanned Surface Vehicles, USV’s, the purpose of which was to work out requirements for the development of unmanned aerial vehicles. In 2002, Advanced Concept Technology Demonstration, ACTD, together with the companies Radix Marine, Northrop Grumman and Raytheon created the concept technology and presented the Spartan Scout boat as the product. This prototype was tested in the Persian Gulf in December 2003 and can serve as a crew-free surface watercraft and modular multi-purpose military platform operating in semi-autonomous mode. It can carry mounted equipment and weapons.
This tool is intended primarily to fight with so-called “asymmetric threats,” such as motor boats, small boats, and other low-cost means of attack, when using the power of guns and anti-ship missiles is expensive and inefficient. Furthermore, such remote-controlled boats can be used for the inspection of suspicious objects in water, as well as to patrol restricted water areas (ports and straits) and critical facilities (oil rigs, lighthouses, etc.).
In 2010, QinetiQ unveiled its new development, an unmanned, invisible reconnaissance boat, Sentry. The machine has a body made in accordance with stealth technology and a powerful water cannon. The company says that the new boat is perfect for the role of a scout and patrol car. It is able to carry different loads, and can be managed from a distance of 30 kilometers.
The development and introduction of Unmanned Undersea Vehicles, or UUV’s, is regulated by a number of Pentagon documents. Initially, in 1994, US Navy program plan #87 on UUV’s called investigating and searching for mines with submarines a top priority. The second priority was the Long-Term Mine Reconnaissance System, or LMRS, and the third was tactical oceanography. This document was slightly amended in 1995 and 1997. In April 2000, recommendations were issued and the complete plan developed on this basis was signed in December 2003. An updated version, called the Unmanned Undersea Vehicle (UUV) Master Plan, was produced in November 2004.
The document stated that nine additional components needed to be added to the “Sea Power in the 21st Century” plan:
1. Intelligence, Surveillance, and Reconnaissance
2. Mine Countermeasures
3. Anti-Submarine Warfare
4. Inspection / Identification
5. Oceanography
6. Communication / Navigation Network Node
7. Payload Delivery
8. Information Operations
9. Time Critical Strike
The main rationale for utilizing Underwater Drones were the following:
Autonomy. The ability to operate independently for extended periods creates a force multiplier that allows manned systems to extend their reach and focus on more complex tasks. Costs may be reduced when sensors or weapons are operated from the smaller infrastructure of a UUV rather than entirely from manned platforms.
Risk Reduction. Their unmanned nature lessens or eliminates risk to personnel from the environment, the enemy, and the unforgiving sea.
Low Profile. UUVs operate fully submerged with potentially low acoustic and electromagnetic signatures. They maintain a low profile when surfaced to extend antennae. The possible deployment for follow-on manned operations in a route or area is not revealed and the element of surprise is preserved. UUV’s have less of a risk of entangling with objects underwater or floating obstructions than towed or hard-tethered systems (such as remotely operated vehicles (ROVs)).
Deployability. By virtue of their potentially smaller size, UUV’s can guarantee an organic opportunity for strike groups. They can be designed as “flyaway” objects or be prepositioned in forward areas. Their launch can be adapted to a variety of platforms including ships, submarines, aircraft, and shore facilities. UUV recovery craft do not need to be identical to the launch platform. Recovery can be delayed or dismissed entirely for low-cost, expendable systems. Multiple UUV’s can be deployed simultaneously from one platform.
Environmental Adaptability. UUV’s can operate in all water depths, in foul weather and seas, under tropical or arctic conditions, and around the clock. Their ability to operate in the medium gives them unique sensor advantages over similar towed or surface-operated sensors.
Persistence. UUV’s can remain in position even in the face of weather that would abort the operations of an Unmanned Aerial Vehicle (UAV) or USV, simply by submerging to a calmer depth. Violent weather might preclude near-surface operations, but UUVs can wait out the storm at depth, precluding a lengthy transit when conditions improve. Likewise, UUVs that lose power (accidentally or intentionally in a “loiter” mode) can settle stably onto the bottom, unlike UAVs and USVs that are at the mercy of the elements as soon as they lose propulsion.
UUVs are to be used in situations in which their performance is optimized, costs less, and enables missions that cannot be performed by manned systems, or can at least reduce the risk to manned systems. The unique characteristics of UUV’s can facilitate meeting these principles, including their ability to put sensors in an optimal position in both the vertical and horizontal dimensions. They are autonomous, durable, hard to observe, expendable, and can keep both distance from or proximity to the launch platform.
The REMUS (Remote Environmental Monitoring Unit System) autonomous underwater vehicles are one of the first undersea drones, and were designed by the Oceanographic Systems Lab at the end of 1990’s and created by Hydroid, a subsidiary of Kongsberg Maritime. REMUS 100 is only 36 kilograms and has been used by the US Navy in shallow waters for mine detection and hydrographic reconnaissance. This equipment is used in other countries. For example, Japan's Ministry of Defense is working with four machines REMUS 600 and one REMUS 100 for seabed mapping and mine detection.
The US Navy currently boasts three type of REMUS:
- MK 18 Mod 1 Swordfish is based on REMUS 100 and is intended for search, classification and mapping in shallow water. The US Navy has 24 Swordfish undersea drones which are distributed among various bases and sub-units.
- MK 18 Mod 2 Kingfish became the prototype of REMUS 600, but has more potential and will serve as a platform for advanced sensors. The configuration of the Kingfish Small Synthetic Aperture Sonar Module (SSAM) provides more bandwidth, high-definition images, and the ability to detect submerged targets. The US Navy is currently working with contractors on the Kingfish’s development, but these systems will be used for military operations until at least September 2015.
- The Littoral Battlespace Sensing (LBS) is also based on REMUS 600. The Space and Naval Warfare Systems Command (SPAWAR) has ordered three LBS for ecological survey of the ocean, coastal and internal waters.
We should note that the rechargeable lithium-ion battery in the REMUS 600 with its 5.2 kilowatt per hour capacity can be used for about 70 hours at a speed of 5 knots at 1970 meters depth.
However, the United States is developing yet another model. The new prototype of autonomous navigation system for underwater robo-boats faced its first racing test in January. The robot autonomously navigated the distance between Gulfport and Pascagoula on the Mississippi River. This system is designed for continuous trawl in fighting against submarines.
The Leidos company which developed the vessel said in a press release that “controlled only by the autonomy system, and with only a navigational chart of the area loaded into its memory and inputs from its commercial-off-the-shelf (COTS) radars, the surrogate vessel successfully sailed the complicated inshore environment of the Gulf Intracoastal Waterway.” Further: "During its voyage of 35 nautical miles, the maritime autonomy system functioned as designed. The boat avoided all obstacles, buoys, land, shoal water, and other vessels in the area – all without any preplanned waypoints or human intervention.”
Specialized US military publications later confirmed this, saying that the autonomous vehicle designed to hunt submarines was an important process step. For example, the Defense One site said that “the oceans may never be the same,” adding that to keep track of increasingly stealthy Russian, Chinese and Iranian submarines, a robotic ghost ship to follow them around the high seas can be used.
The creation of an autonomous vessel for tracking silent diesel submarines was reported for the first time in 2010 by the DARPA agency. The program was called the Anti-submarine Warfare Continuous Trail Unmanned Vessel, or ACTUV.
Experts point out that, in fact, this program can potentially change not only naval warfare, but also the ways in which people, vehicles, and robotic systems interact in the water in the whole world.
The Leidos engineering company and DARPA tested the ACTUV prototype half months and subjected to 100 different scenarios. The test vessel is equipped with radar components, software, and pre-programmed for several navigation points capable of detecting a target at a one kilometer distance without bumping into rocks, shoals or other ships.
Tests showed that the robot-boat was able to fulfill difficult military missions without violating the International Rules of Preventing Collision at Sea. The tests also presented convincing evidence of the concept’s competence by showing that large robots can navigate in the open sea with cruise and fishing boats. The next ACTUV challenge will be tests with “enemy ships” that will try to block the boat-robot.
While Leidos has spent time testing the 42-foot boat surrogate, the construction of a prototype ACTUV vessel called “Sea Hunter” is to be completed by autumn 2015.
The idea of making such vessels similar to sea animals is quite natural. At the end of 2014, the US Navy completed testing the GhostSwimmer, which is the latest in a series of innovative projects developed within the framework of the Silent NEMO project. GhostSwimmer was designed to resemble the shape and mimic the style of behavior of large fish. With a length of about 1.5 meters and a weight of almost 45 kg, the GhostSwimmer can work at depths ranging from 0.25 to 90 meters. Its bio-mimicry provides additional safety in poor visibility during intelligence, surveillance and reconnaissance missions.
The similar BIOSwimmer project was developed by Boston Engineering, and looks like a fish robot designed to detect contraband hidden in a hull with the sophisticated sensors.
It is expected that many companies and laboratories which are engaged in the research and design of submarines and surface robots will actively cooperate in accelerating technical processes and presenting prototypes to customers. On January 30th, 2015 the Huntington Ingalls Industries company announced that it had acquired the Engineering Solutions Division of the Columbia Group company, the leading developer and manufacturer of unmanned underwater vehicles for domestic and international customers. In particular, the company developed the underwater multifunctional vessel Proteus, which received an award in 2012. Obviously, this decision was made in accordance with the Pentagon’s new strategy. One of the leaders explained it: “As the Navy moves toward greater employment of unmanned vehicles in both the surface and undersea domains, it makes great strategic sense to bring together a builder of unmanned undersea vehicles and one of the world’s great builders of naval ships and submarines.” " Now the Engineering Solutions Division will be renamed to Undersea Solutions Group and will provide its information to shipbuilders.
But there are also combined amphibious robots. A research team from Stamford, Connecticut, developed an amphibious robot that they are currently testing with the Marines. The GuardBot is a robot ball that swims over water at about 4 miles per hour and then rolls along the beach, at as much as a 30-degree incline at 20 miles per hour.
The GuardBot uses a nine-axis stabilization, “pendulum motion” propulsion system, which moves the bot forward by shifting the center of gravity back and forth with a variety of steering algorithms.
In January 2014, GuardBot Inc tested it at the amphibious naval base in Little Creek, Virginia, where the GuardBot successfully completed its mission and returned to ship.
The company is working on a new software that includes geographic information systems that guarantee greater autonomy. One only needs to select a location on the map, and the ball will roll there.
The system has been primarily designed for monitoring and inspecting facilities. The robot can be rotated 360 degrees, so it is more maneuverable than other terrestrial robots. During the tests with lasers, the spectroscope with payload (two small transparent hemisphere on one side of the robot) was able to detect explosive chemicals, which were about 2 inches apart.
But the robot can not only explore and research - it can be directly used as a means for carrying explosive materials.
NATO is also paying attention to the development of underwater and surface drones. On May 4th, 2015, the Center for Marine Research and Experimentation, together with relevant command structures, held exercises in the North Sea, strangely enough titled “Dynamic Mongoose.” The maneuvers assessed autonomous networks in the northern climate and in the context of anti-submarine fighting, including in shallow waters. The network of autonomous sensors could potentially be involved in constant surveillance and would transcend traditional assets at less expensive cost and risk. NATO scientists are working on deploying underwater robots, including gliders and autonomous underwater vehicles. They have also worked on developing the skills of multi-static tactical training which allows one to visualize the underwater environment in an operation zone. The purported enemies for the exercises were Russian submarines.